Gap contact elements | |||||||
|
| ||||||
ProductsAbaqus/Standard
Choosing and defining a gap element
GAPUNI elements model contact between two nodes when the contact direction is fixed in space. GAPCYL elements model contact between two nodes when the contact direction is orthogonal to an axis. GAPSPHER elements model contact between two nodes when the contact direction is arbitrary in space. GAPUNIT elements model contact and thermal interactions between two nodes when the contact direction is fixed in space. DGAP elements model thermal interactions between two nodes in heat transfer analysis.
Gap elements are defined by specifying the two nodes forming the gap and providing geometric data defining the initial state and, if necessary, the direction of the gap.
![]()
Defining the gap element's properties
You must associate the gap behavior with a set of gap elements.
Input File Usage
GAP, ELSET=element_set_name
GAPUNI and GAPUNIT elements
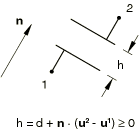
The contact behavior of the interface being modeled with GAPUNI and GAPUNIT elements is defined by the initial separation distance (clearance), d, of the gap and the contact direction, . In addition, GAPUNIT elements have temperature degrees of freedom that allow modeling of thermal interactions in coupled temperature-displacement analyses.
Clearance between GAPUNI nodes
Abaqus/Standard defines the current clearance between two nodes of the gap, h, as
where and are the total displacements at the first and the second node forming the GAPUNI element. Figure 1 shows the configuration of the GAPUNI element. When h becomes negative, the gap contact element is closed and the constraint is imposed.
You specify a value for d. If you provide a positive value, the gap is open initially. If d=0, the gap is initially closed. If d is negative, the gap is considered overclosed at the start of the analysis and an initial interference fit problem is defined. Details about modeling interference fit problems with gap elements are discussed below.
Input File Usage
GAP d
Specifying the contact direction
You can specify the contact direction. Otherwise, Abaqus/Standard will calculate the gap direction, , by using the initial positions of the two nodes forming the element, and :
An error message is issued if (if the two gap element nodes have the same initial coordinates). In this situation you must define . The normal usually points from the first node of the element to the second, unless the gap is overclosed at the start of the analysis. In that case specify so that the correct contact direction is used for the gap element.
If you specify the gap direction rather than allowing Abaqus/Standard to calculate it, the contact calculations consider only , the displacements of the gap element's nodes, and the ordering of the nodes in the element definition: the initial coordinates of the nodes play no role in the calculations.
The orientation of does not change during the analysis.
Input File Usage
GAP , X-direction cosine, Y-direction cosine, Z-direction cosine
Local basis system for GAPUNI element output
Abaqus/Standard reports the pressure transmitted across the gap and the shear stresses that are orthogonal to the contact direction as element output for GAPUNI elements. You must supply the contact area associated with these elements for Abaqus/Standard to compute the pressure and the shear stress values. It also reports the current clearance in the gap, h, and the relative motions of the GAPUNI nodes orthogonal to the contact direction. The relative motions and the shear stresses are reported in local surface directions that are formed using the standard Abaqus convention for defining directions on surfaces in space (see Conventions). The contact direction defines a surface in space on which the local axes are formed.
Input File Usage
GAP , , , , cross-sectional area
GAPCYL elements
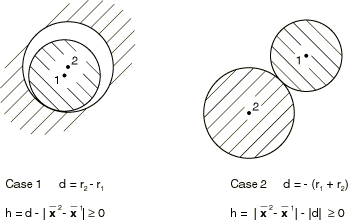
GAPCYL elements can be used to model two very different contact situations: contact between two rigid tubes, where the smaller one is inside the larger tube, and contact between two rigid tubes along their external surfaces. Both cases are shown in Figure 2.
The behavior of a GAPCYL element is defined by the initial separation distance between the nodes, d; the current positions of the element's node; and the axis of the GAPCYL element. The axis of the GAPCYL element defines the plane in which the contact direction, , lies. You specify d and the direction cosines of the GAPCYL element axis.
The value is not allowed: it would enforce the distance between the nodes to be exactly zero at all times, which does not correspond to a contact problem.
Input File Usage
GAP d, X-direction cosine, Y-direction cosine, Z-direction cosine
Defining the gap clearance for Case 1 (when d is positive)
If d is positive, the GAPCYL element models contact between two rigid tubes of different diameter, where the smaller tube is located inside the larger tube (see Case 1 in Figure 2). In this case d is the maximum allowable separation. Each tube is represented by a node on its axis, with the axes connected by the GAPCYL element; and d corresponds to the difference between the radii of the tubes. The gap between the tubes closes when the two nodes become separated by more than d in any direction in the plane defined by the axis of the GAPCYL element.
Abaqus/Standard defines the current gap opening, h, in GAPCYL elements for Case 1 as
where is the current position of node N, d is the specified initial separation, and a is the axis of the GAPCYL element.
If the initial position of the tube axes is such that the distance between them is less than d, the GAPCYL element is open initially. If the distance is equal to d, the element is closed initially; and if the distance is greater than d, an initial overclosure (interference) is defined. Details about modeling interference fit problems with gap elements are discussed below.
Defining the gap clearance for Case 2 (when d is negative)
If d is negative, the GAPCYL element models external contact between two parallel rigid cylinders (see Case 2 in Figure 2). In this case is the minimum allowable separation of the nodes. Each cylinder is represented by a node on its axis connected by the GAPCYL element, and corresponds to the sum of the radii of the cylinders. The gap closes when the two nodes approach each other to within in any direction in the plane defined by the axis of the GAPCYL element.
Abaqus/Standard defines the current gap opening, h, in GAPCYL elements for Case 2 as
If the initial position of the cylinder axes is such that the distance between them is greater than , the GAPCYL element is open initially. If the distance is equal to , the element is closed initially; and if the distance is less than , an initial overclosure (interference) is defined. Details about modeling interference fit problems with gap elements are discussed below.
Local basis system for GAPCYL element output
Abaqus/Standard reports the pressure transmitted across the gap and the shear stresses that are orthogonal to the contact direction as element output for GAPCYL elements. You must supply the contact area associated with these elements for Abaqus/Standard to compute the pressure and the shear stress values. It also reports the current clearance in the gap, h, and the relative motions of the element's nodes that are orthogonal to the contact direction. The relative motions and the shear stresses are reported in local surface directions that are formed using the standard Abaqus convention for defining directions on surfaces in space (see Conventions). The contact direction defines a surface in space on which the local axes are formed, and the slip is calculated from the relative motions in the surface directions.
Abaqus/Standard updates the contact direction for GAPCYL elements based on the motion of the nodes forming the elements. However, the orientation of is not updated during the analysis.
Input File Usage
GAP , , , , cross-sectional area
GAPSPHER elements
GAPSPHER elements can be used to model two very different contact situations: contact between two rigid spheres where the smaller sphere is inside the larger, hollow sphere, and contact between two rigid spheres along their external surfaces. Both cases are shown in Figure 2.
The behavior of a GAPSPHER element is defined by the minimum or maximum separation distance between the nodes, d, and the current positions of the element's nodes. You specify the minimum or maximum separation distance, d. The contact direction is defined by the current position of the nodes.
The value is not allowed: it would enforce the distance between the nodes to be exactly zero at all times, which does not correspond to a contact problem.
Input File Usage
GAP d
Defining the gap clearance for Case 1 (when d is positive)
If d is positive, the GAPSPHER element models contact between a rigid sphere inside another (larger) hollow rigid sphere (see Case 1 in Figure 2). In this case d is the maximum allowable separation of the nodes forming the gap. Each sphere is represented by a node at its center, with the centers connected by the GAPSPHER element; and d corresponds to the difference between the radii of the spheres. The gap closes when the two nodes become separated by more than d.
Abaqus/Standard defines the current gap opening, h, for Case 1 as
with the current position of node N and d the specified separation.
If the initial position of the tube axes is such that the distance between them is less than d, the GAPSPHER element is open initially. If the distance is equal to d, the element is closed initially; and if the distance is greater than d, an initial overclosure (interference) is defined. Details about modeling interference fit problems with gap elements are discussed below.
Defining the gap clearance for Case 2 (when d is negative)
If d is negative, the GAPSPHER element models external contact between two rigid spheres (see Case 2 in Figure 2). In this case is the minimum allowable separation of the nodes forming the gap. Each sphere is represented by a node at its center connected by the GAPSPHER element; and corresponds to the sum of the radii of the spheres. The gap closes when the two nodes approach each other to within .
Abaqus/Standard defines the current gap opening, h, for Case 2 as
If the initial position of the cylinder axes is such that the distance between them is greater than , the GAPSPHER element is open initially. If the distance is equal to , the element is closed initially; and if the distance is less than , an initial overclosure (interference) is defined. Details about modeling interference fit problems with gap elements are discussed below.
Local basis system for GAPSPHER element output
Abaqus/Standard reports the pressure transmitted across the gap and the shear stresses that are orthogonal to the contact direction as element output for GAPSPHER elements. You must supply the contact area associated with these elements for Abaqus/Standard to compute the pressure and the shear stress values. It also reports the current clearance in the gap, h, and the relative motions of the element's node that are orthogonal to the contact direction. The relative motions and the shear stresses are reported in local surface directions that are formed using the standard Abaqus convention for defining directions on surfaces in space; see Conventions. The contact direction defines a surface in space on which the local axes are formed, and the slip is calculated from the relative motions in the surface directions.
Abaqus/Standard updates the contact direction for GAPSPHER elements based on the motion of the nodes forming the elements.
Input File Usage
GAP , , , , cross-sectional area
DGAP elements
DGAP elements are used to model thermal interactions between two nodes in heat transfer analyses. The behavior of the interaction being modeled is defined by the initial separation distance (clearance), d, of the gap.
Clearance between DGAP nodes
Abaqus/Standard defines the clearance between two nodes of the gap, h, as
Since there are no displacements in a heat transfer analysis, the clearance remains unchanged. The clearance is used only for clearance-dependent thermal interactions.
You specify a value for d. If you provide a positive value, the gap is open initially. If d=0, the gap is closed initially. If d is negative, the gap is considered overclosed but no interference fit is performed. The contact direction does not need to be specified: any contact direction specified is ignored in the analysis. You must supply the contact area associated with these elements for Abaqus/Standard to compute the heat flux value per unit area.
Input File Usage
GAP d, , , , cross-sectional area
![]()
Defining nondefault mechanical interactions with gap elements
The default mechanical interaction model for problems modeled with gap elements is “hard,” frictionless contact. You can assign optional mechanical interaction models. The following mechanical interaction models are available:
Friction. See Frictional behavior for details.
Modified “hard” contact, softened contact, and viscous damping. See Contact pressure-overclosure relationships and Contact damping for details.
![]()
Defining thermal surface interactions with GAPUNIT and DGAP elements
You can assign thermal interaction models to these elements. The following thermal interaction models are available:
Gap conduction.
Gap radiation.
Gap heat generation.
These thermal interaction models are discussed in Thermal contact properties.
![]()
Modeling large initial interference with gap elements
Specifying a large negative initial overclosure (interference) may lead to convergence problems as Abaqus/Standard tries to resolve the overclosure in a single increment. You can prescribe an allowable interference to allow Abaqus/Standard to resolve the overclosure gradually. See Modeling contact interference fits in Abaqus/Standard for more details on modeling interference fit problems.
Input File Usage
CONTACT INTERFERENCE, TYPE=ELEMENT